
01
平衡校正是基于转子不平衡-即由于转子中心主惯性轴与旋转轴线不重合而产生的现象,所产生的机械工艺需求。该技术借助改变转子内部的质量分布,尽量使其中心主惯性轴与旋转轴线重合,不影响转子正常旋转,降低设备振动、减少设备故障,尽量接近理想平衡。
进行平衡校正前需要借助平衡机检测转子不平衡量。

卓茂自动化平衡机系列适用于不平衡量检测并自动校正平衡
根据《GB/T42101-2006 ISO2953:1999平衡机的描述检验与评定》,转子不平衡以及平衡机校验涉及不平衡量、初始不平衡量、剩余不平衡量等,相关指标的具体数值影响转子平衡校正的难度、校正效果。
02
平衡产业最早可追溯到1870年,在这一年加拿大人Henry Martinson申请了平衡技术的专利 ,拉开了平衡校正产业的序幕。
Henry Martinson
到今天21世纪,平衡机的发展历史走过一百多个年头。随着社会工业的进步,转子被应用至各行各业,为应对不同产品的平衡测量与校正需求,平衡机也在发展过程中演变出包括立式平衡机、卧式平衡机、软支承动平衡机、硬支承动平衡机以及全自动平衡机等类型。
03
转子平衡有多种实现方式,当我们使用平衡机测量出转子不平衡的量值或相位后,通常有以下校正方法。
- 去重法 即在重的一方用钻孔、磨削、錾削、铣削和激光穿孔等方法去除一部分金属。
- 加重法 即在轻的一方用螺钉连接、铆接、焊接和喷镀金属等方法,加上一部分金属。
- 调整法 即通过拧入或拧出螺钉以改变校正重量半径,或在槽内调整两个或两个以上配重块位置。
- 热补偿法 即通过对转子局部加热来调整工件装配状态。
转子平衡校正方法的选取取决于转子结构和工艺要求以及校正面的数量、几何形状等,校正面数量决定了转子需要做静平衡或动平衡。
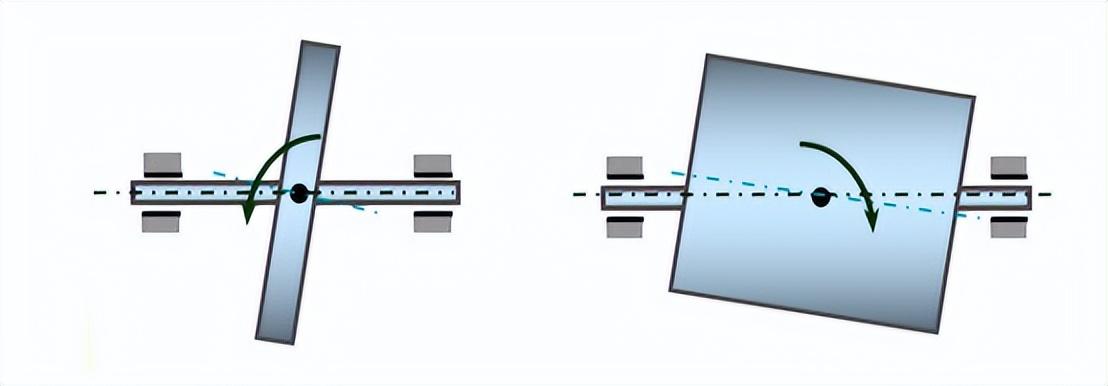
动不平衡:离心惯性力系有合力偶
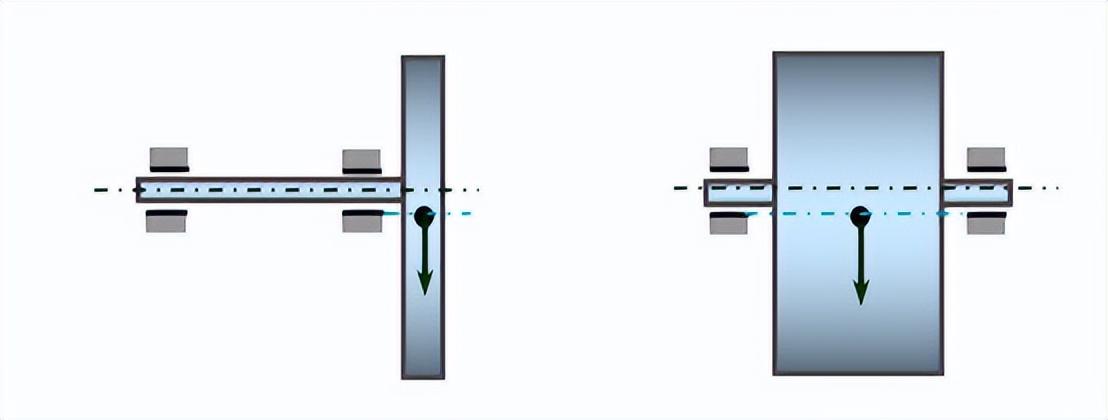
静不平衡:离心惯性力系有合力
但是无论采用哪种平衡方法,在确定平衡重量之前,都必须正确地选取试加质量。试加平衡质量选取得是否恰当,将直接影响平衡试验的成败,特别是在测振幅的平衡中。当转子严重不平衡时或轴承振动过大时,如果试加平衡质量过小,将不会使轴承振动产生显著的变化,也就无法得到正确的校正质量的大小和相位。试重的选取包括大小和相位两个方面,相位的选取一般根据平衡经验并参考平衡的历史记录。在试重的选取一般遵循选择合适的试重大小,保证振动变化在合理范围之内;并加在原始不平衡的反方向,以引起振动的减少。
当转子支承在平衡台上进行平衡实验时,单个平衡面试加平衡的大小可由下式计算:

式中,
A0为原始振动幅值;K为平衡台灵敏度系数,m/ (g.m)。平衡台灵敏度系数K对刚性一、二阶振动是不同的。对于摇摆式和弹性式平衡台,转子重5~40T ,在一阶振型下,K1=1.5~2.0 m/(g.m);在二阶振型下,K2=3.0~4.0m/(g.m)。转子的质量大小不同,灵敏度系数也就不同。一般地,质量小的转子取上限,质量大的转子取下限。
当转子在自身支承上进行平衡实验时,每个试加质量由下式估算:

式中:P——转子某一侧面的试加质量,单位是kg;
A0——转子某一侧面轴承原始振动幅值,单位是m;
r——试加平衡质量的安装半径,单位是m;
ω——平衡时转子的角速度,单位是rad/s;
M——转子的质量,单位是kg;
g——重力加速度,单位是m/s²;
s——灵敏度系数,对发电厂中的旋转机械,其值可参考下表。

04
由于各种客观因素的存在,平衡机不能测出转子不平衡量的完全真实值,同时在平衡过程中,除平衡机自身的测量误差外,存在因平衡校正的不准确(包括校正量的大小和位置)而产生的误差,这种误差称为校正误差。
该误差类型可分为校正角度误差、校正幅值误差、校正半径误差和校正平面位置误差等。在实际校正中,上述的四种误差常会综合出现,因此在做平衡测量以及校正时需要进行多次不平衡量测试并调整校正质量,以尽可能接近较为理想的校正效果。